Para peneliti di ETH Zürich sangat pandai menjaga robot tetap berdiri. Pada tahun 2022 lalu, tim robotika sekolah mengajari robot berkaki empat ANYmal cara mendaki gunung tanpa terjatuh. Penelitian baru dari sekolah tersebut, yang diterbitkan bekerja sama dengan Max Planck Institute for Intelligent Systems yang berbasis di Stuttgart, mengambil pendekatan unik untuk memecahkan masalah melintasi medan yang tidak rata.
Otot buatan yang dipamerkan oleh sekolah dikendalikan oleh sistem elektro-hidraulik hybrid. Seiring dengan kemampuan beradaptasi dengan medan yang dilalui, kaki bergerak lebih cepat dan melompat lebih tinggi dibandingkan kaki listrik, semuanya tanpa memerlukan sensor atau kontrol tambahan.
Aktuator kaki ternyata sangat sederhana. Kelompok tersebut menyebutnya “kantong plastik berisi minyak, mirip dengan yang digunakan dalam es krim.” Kantong-kantong itu ditutupi dengan elektroda. Sejujurnya, ini semua terdengar seperti proyek sains sekolah.
“(A)jika kita mengalirkan listrik ke elektroda, elektroda akan tertarik satu sama lain karena adanya listrik statis,” kata mahasiswa pascasarjana Thomas Buchner. Begitu pula ketika saya meletakkan balon di kepala, rambut saya menempel pada balon tersebut karena arus listrik yang sama.
Kantong tersebut mengembang atau menyusut, bergantung pada gaya yang digunakan. Berbeda dengan aktuator listrik konvensional, mesin ini tidak menghasilkan banyak panas.
Jadi aktuator membantu mesin melintasi permukaan yang tidak rata dan membantunya melompat. Namun, dalam hal penggunaan sebenarnya, perjalanan sistem ini masih panjang.
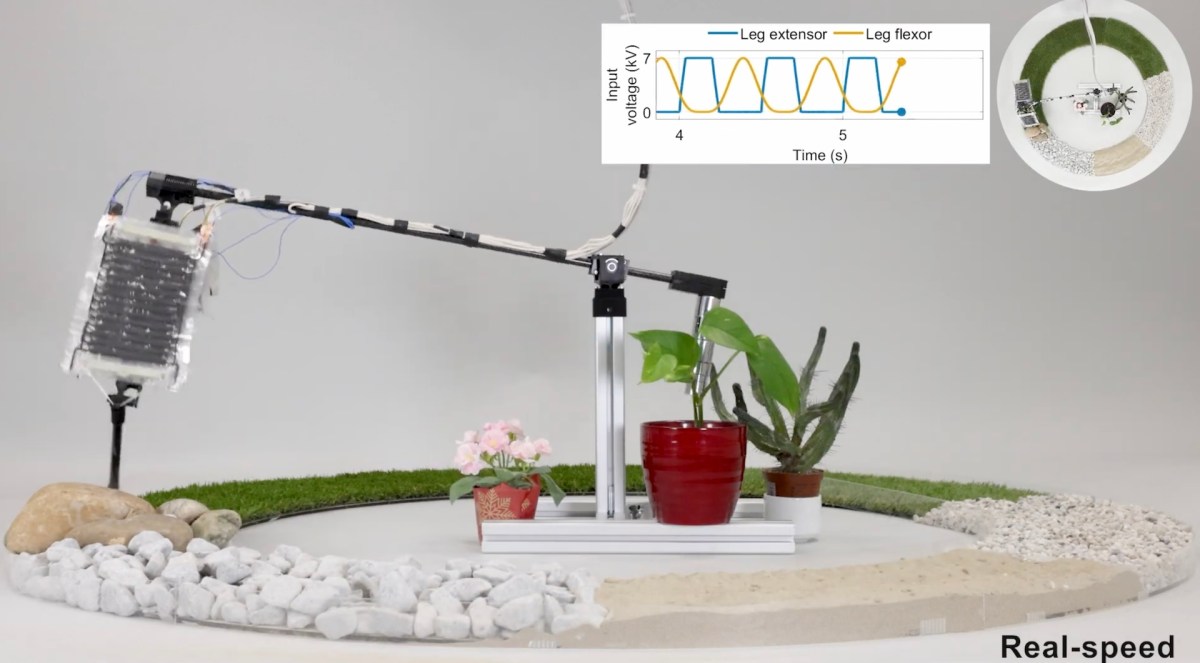
“Dibandingkan robot berjalan dengan motor listrik, mesin kami masih kecil. Saat ini kakinya terikat pada tongkat, melompat-lompat dan tidak bisa bergerak bebas,” kata Christoph Keplinger, profesor di Max Planck Institute robot berkaki menjadi robot berkaki empat atau robot humanoid berkaki dua, mungkin suatu saat nanti, kalau punya baterai, kita bisa menggunakannya sebagai robot penyelamat.











